小车运动控制系统实训模型
一、系统概述
1、概述
小车运动控制系统实训模型由运动小车、同步带轮传动机构、直流电机、光电传感器,电感式传感器、电容式传感器、超声波传感器、行程开关等组成,通过传感检测、PLC编程,实现运动距离测量、传动控制、键值优化比较行走控制、定向控制、定位控制、报警运行控制、点动控制、位置显示控制等,能实现小车的精确定位。该系统外观精美,体积紧凑,重量轻,行程范围: 0.6米。实验系统能满足大中专院校可编程控制器技术的教学、课程设计和毕业设计。

2、配置
控制系统采用AB PLC,主机实训组件配置罗克韦尔CompactLogix系列可编程序控制器:
电源模块1769-PA2;
CPU模块1769-L32E(带有RS232及工业以太网接口)
1784-CF64 64MB存储卡
数字量输入模块1769-IQ16 (16DI)
数字量输出模块1769-OB16(16DO)
配套CP3通信编程电缆
1769-L32E, compactlogix控制器模块。
CompactLogix平台包含有基于Logix平台的优点---通用的编程环境,通用的网络,通用的控制引擎,结构紧凑而性能卓越。与Compact输入输出(Compact I/O)组合在一起的CompactLogix平台是装备小型、设备级控制应用的完美解决方案,有着极高的性能和可扩展性。
1769-L32E支持的编程语言有:继电器梯形图、功能块图、结构化文本、顺序功能块。
1769-L32E自带1个RS-232通讯口和1个Ethernet/IP以太网通讯口。
1769-L32E控制器支持型号为1784-CF64、内存大小为64M的CompactFlash下,支持型号为1784-CF128、内存大小为128M的CompactFlash卡。
1769-L32E的模块扩展能力:*多可扩展16个1769系列的模块。
3、小车对象模型
(1) 概述
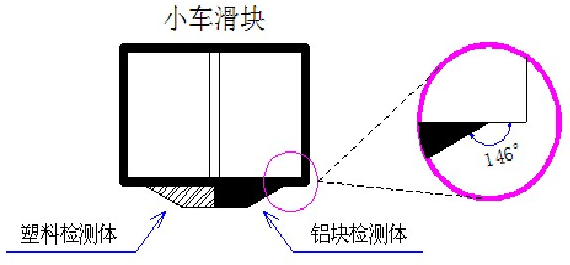
本小车运动控制系统实训教学模型由运动小车、同步带轮传动机构、直流电机、光电传感器、电感式传感器、电容式传感器、行程开关等组成,通过传感检测、PLC编程,实现运动距离测量、传动控制、键值优化比较行走控制、定向控制、定位控制、点动控制、位置显示控制等,能实现小车的精确定位。
(2) 系统配置
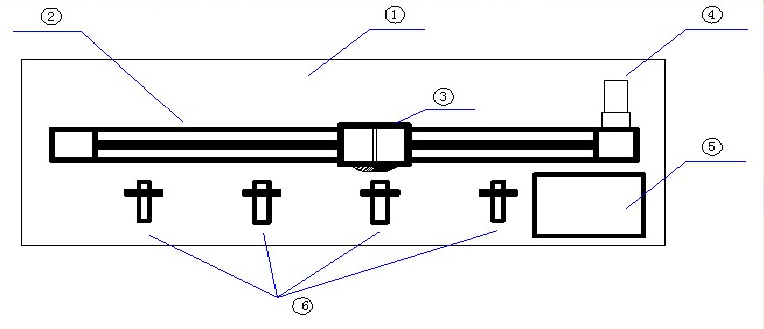
①安装底板:用于安装各种执行器及控制器的支撑体;
②导轨:用于固定同步带/轮,牵曳滑块小车运动及定义滑块小车的运行轨迹;
③滑块小车:整套系统的被控对象;
④直流减速电机:整套系统的执行机构,用于带动被控对象小车;
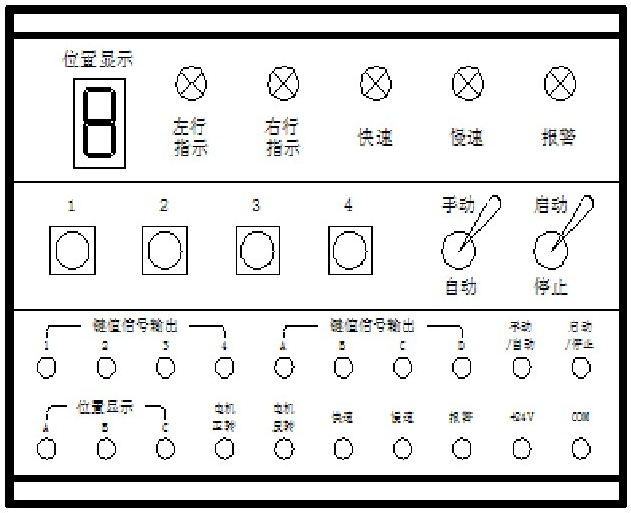
⑤操作盒:安装有各种控制输入及输出显示机构;如下图所示:
⑥传感器机构:安装有各种传感器,例如电感式、电容式、光电式等,用于检测控制对象的位置信息;
4、系统软件
(1) RSLinx通讯组态软件
①使用1756-CP3电缆进行通讯
②1769-L32E以太网联机设置
(2) RSLogix5000编程软件应用
①新建工程
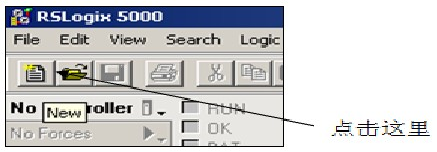
1)点击 ,打开RSLogix5000编程软件。
,打开RSLogix5000编程软件。
2)选择File→New,或者点击“新建”工具,创建一个工程。
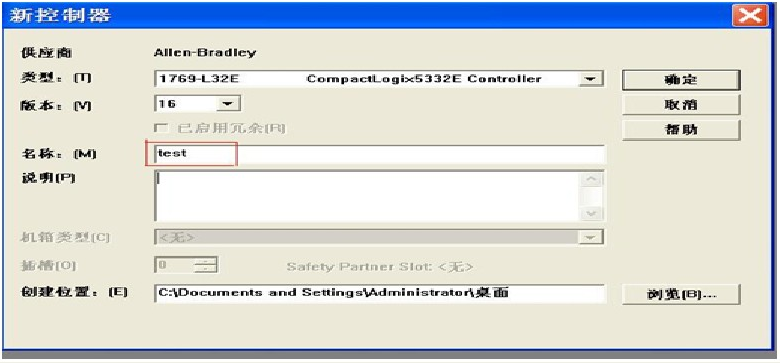
3)新建控制器,选择控制器类型、版本和槽号,并输入控制器的名称、描述(可选),指定框架类型和项目保存目录,然后点击0K。
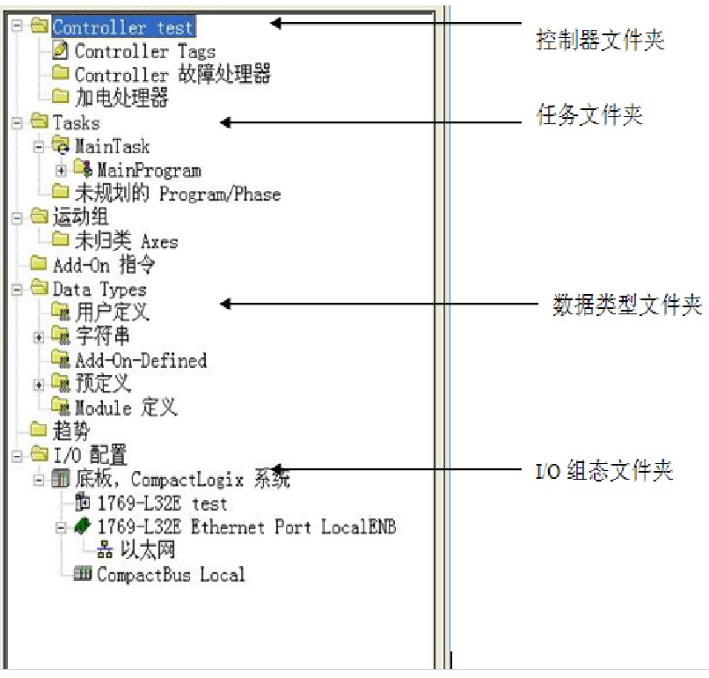
4) 树形目录项目管理器
②I/0配置
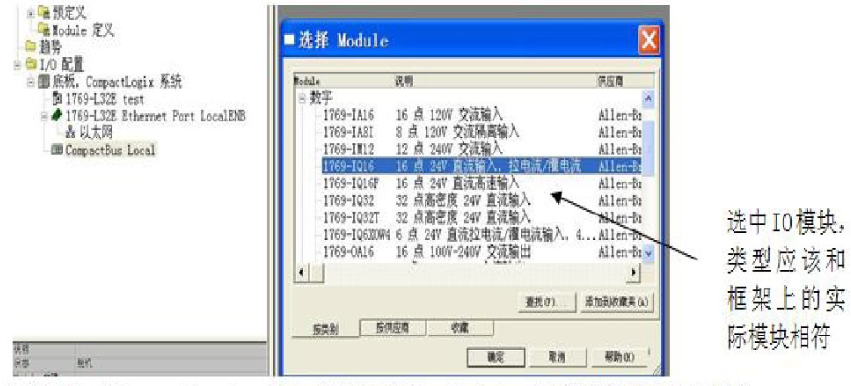
1) 组态本地数字量I/0模块,右键点击"CompactBus Local",然后选择New Module。在模块类型列表中选择1769-I016 (数字量直流输入模块),单击“确定"。
2) 右键点击"ComactBus Local",然后选择New Module。在模块类型列表中选择11769-0B16 (数字量直流输出模块),单击“确定";
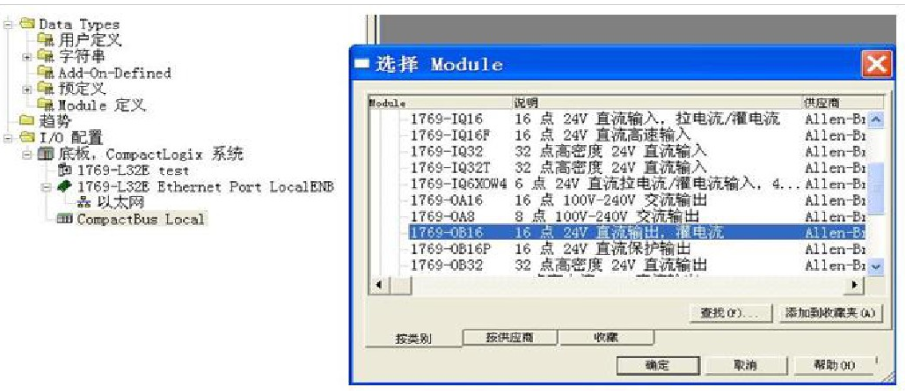
3) 这样,一个本地数字量输入输出模块就组态好了,项目管理器中将出现该模块的图标,用户可以通过右键点击该图标然后选择“属性”来更改组态信息。

③创建并管理任务
1)新建一个例程(Routine),在程序文件夹上点击右键,然后选择New routine,输入例程名称、描述(可选),选择例程的编程语言等,然后点击OK.
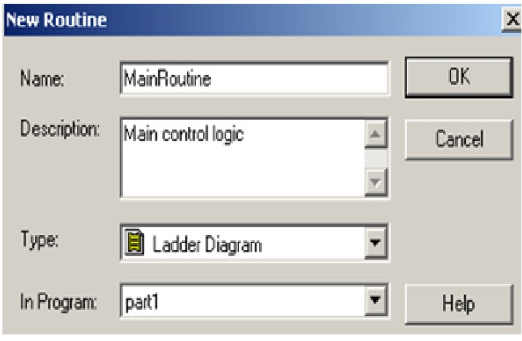
2) Type: RSLogix5000支持梯形图、功能共、结构文本和顺序功能图四种编程语言,新建例程默认的编程语言是梯形图。
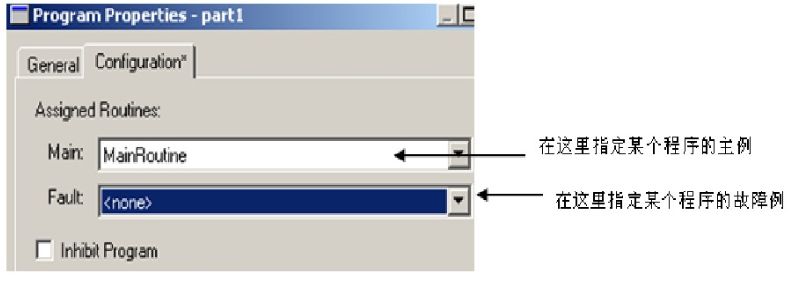
3)每个程序都应有一个主例程。控制器启动相关联的任务并调用该程序时,主例程是首先执行的例程。在主例程里可以使用如JSR这样的跳转指令来词用其他例程。
4)组态某个程序时可以指定该程序的主例程。
④编辑梯形图逻辑
1) 双击某一个例程打开相应的梯形图逻辑编辑窗口,使用指令工具栏可以在梯级中添加所需的逻辑。
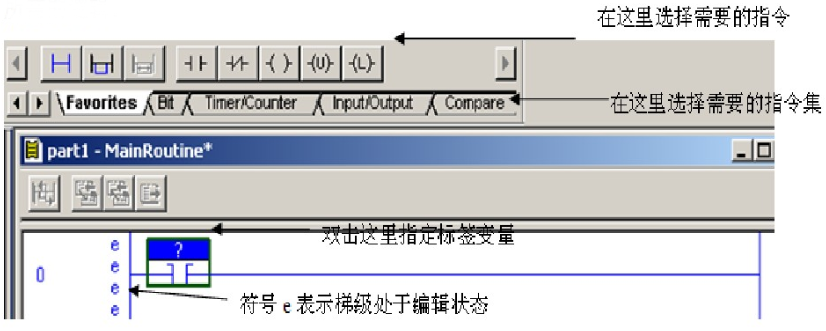
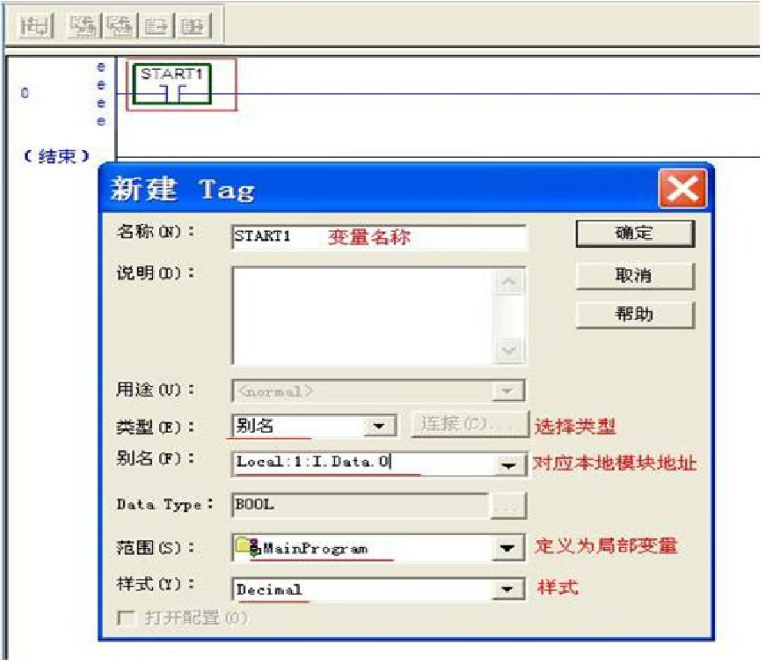
2)添加了一个指令后,要为指令指定操作数,即指定标签变量。在问号上双击,然后输入相应的标签名称或从数据库列表中选择。
全局变量定义:
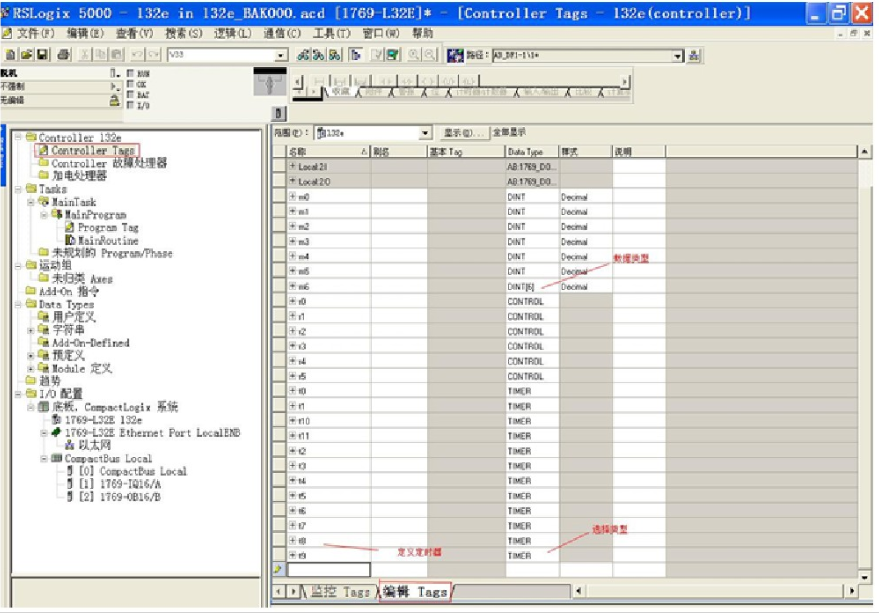
局部变量定义,在本控制程序内使用:
⑤下载工程
1) 下载工程之前,首先要确保已经用网络连接好了控制器,并且在RSLinx组态了相应的通讯驱动(RSLinx通讯组态),在菜单中点击Communications,然后选择Who Active,指定从开发工程的设备到控制器的通讯路径。

2)下载工程的时候,控制器必须处于编程或者远程编程的状态(通过旋转处理器上的钥匙来选择控制器处于Run, Rem还是Test,处于Run和Test的时候不能下载工程)。
3)下载完成后,工程的控制器状态栏便处于在线状态,显示控制器的状态信息。同时,梯级执行线变成绿色的两条线。
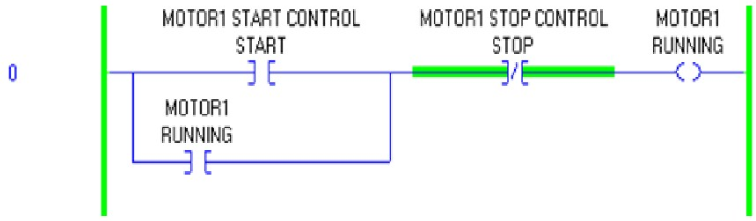
4) 这样,便可以通过改变输入条件来控制输出。
⑥故障处理
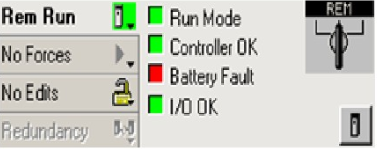
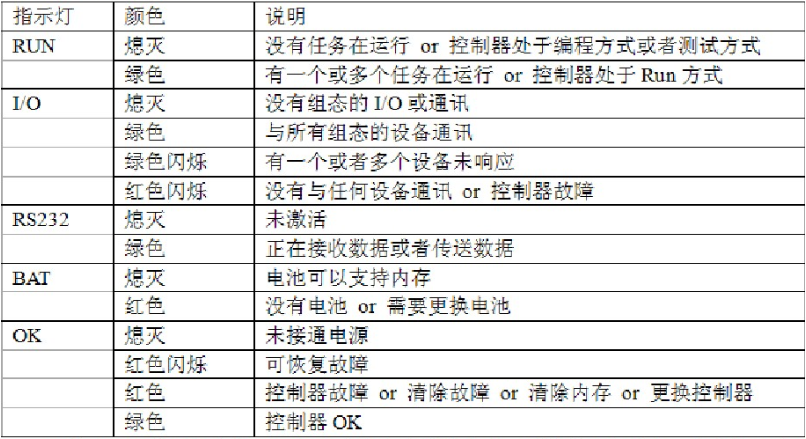
1)控制器面板上的LED指示灯显示了控制器的当前状态,我们可以通过监控LED指示灯来直接诊断某些控制器故障。
指示灯的状态如下:
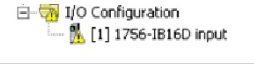
2) 使用项目管理器中的I/0组态文件夹查看确定那一个模块没有响应。该文件夹中显示控制器已组态的模块,如果控制器检测到错误条件或者某一个模块存在故障,将在相应模块上显示一个黄色的警告符号。
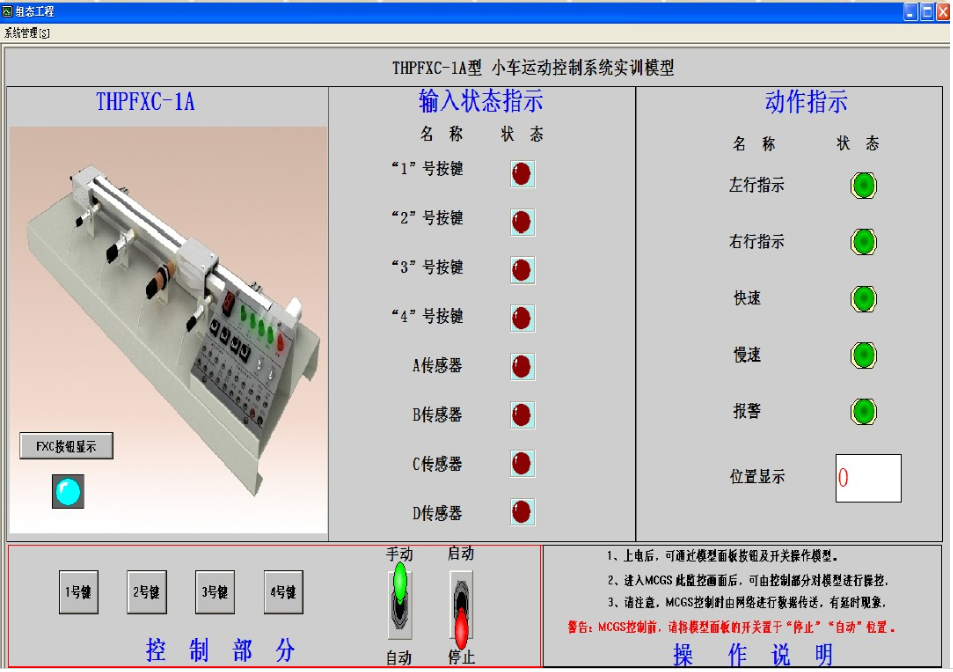
二、小车运动系统上位机组态监控