机器人本体铸件-607L
一、产品介绍
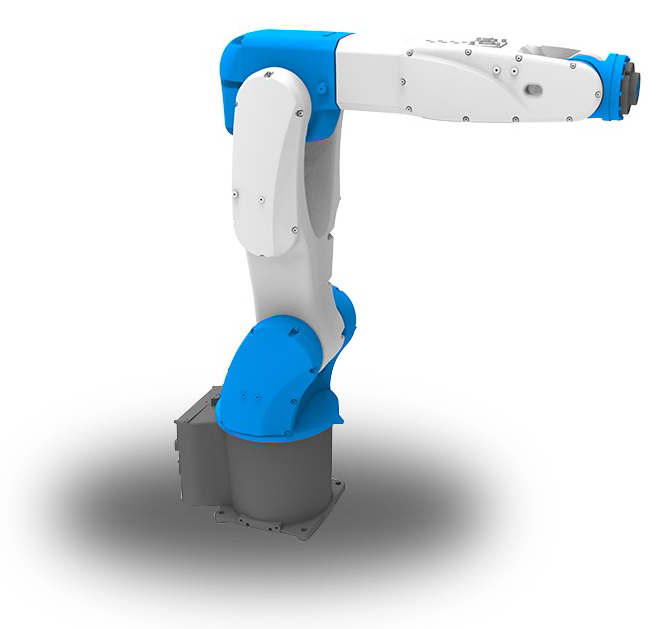
轻量型机器人,外形小巧、重量轻,是*适合用于组装小型单元机器人,能够高速、高精度的完成上下料、分拣、装配等各项工作。同时所有机器人线缆内置,能够在狭小的空间灵活的进行作业,安装方式可以选择地面安装、挂装、倒装。机器人本体铸件607/607L特性:手腕额定负载5Kg,*大负载波6Kg,*大工作半径720mm,L型*大工作半径为910MM。
二、产品特点
重量轻
运行速度快
外型美观
重复定位精度高
内置线缆
三、产品应用
搬运货物
1、更大的灵活性,更稳定的性能、更低的能耗;
2、具有高速性的*大化吞吐量;
3、超长的工作运行时间;
4、节省地面空间;
装配
1、高速度、高重复定位精度;
2、节省地面空间;
3、超长的工作运行时间;
打磨
1、防护等级高;
2、手腕力矩大;
四、技术参数
|
型 号 |
607/607L |
|
手腕负载 |
额定 5 kg |
|
*大 6 kg |
|
*大工作半径 |
780mm/900mm |
|
自由度 |
6 |
|
关节速度 |
J1 |
370°/s |
|
J2 |
370°/s |
|
J3 |
430°/s |
|
J4 |
300°/s |
|
J5 |
460°/s |
|
J6 |
600°/s |
|
关节范围 |
J1 |
±170° |
|
J2 |
±110° |
|
J3 |
"+40°/- 220° |
|
J4 |
±185° |
|
J5 |
±120° |
|
J6 |
±360° |
|
瞬间容许*大转矩 |
J5 |
35Nm |
|
J6 |
24Nm |
|
重量 |
30kg/32kg |
|
重复定位精度 |
±0.05mm |
|
工作温度 |
0-40℃ |
五、工作空间







