





| 序号 | 设备名称 | 主要参数 | ||||||||||||||||||||||||
| 1 | 工业机器人 |
1) 型 号 TR607 2) 手腕负载 3) 额定 5 kg 4) *大 6 kg 5) *大工作半径 720mm 6) 自由度 6轴 7) J1 370°/s 8) J2 370°/s 9) 关节速度 10) J3 430°/s 11) J4 300°/s 12) J5 460°/s 13) J6 600°/s 14) J1 ±170° 15) J2 ±110° 16) 关节范围 17) J3 "+40°/- 220° 18) J4 ±185° 19) J5 ±120° 20) J6 ±360° 21) 瞬间容许*大转矩 22) J5 35Nm 23) J6 24Nm 24) 本体重量 30kg 25) 重复定位精度 ±0.05mm 26) 工作温度 0-40 ℃  27) 产品介绍 轻量型机器人,外形小巧、重量轻,是*适合用于组装小型单元机器人,能够高速、高精度的完成上下料、分拣、装配等各项工作。同时所有机器人线缆内置,能够在狭小的空间灵活的进行作业,安装方式可以选择地面安装、挂装、倒装。607特性:手腕额定负载 5Kg,*大负载波 6Kg,*大工作半径 720mm。 产品特点:重量轻、运行速度快、外型美观、重复定位精度高、内置线缆、产品应用物料搬运、更大的灵活性,更稳定的性能、更低的能耗;具有高速性的*大化吞吐量;超长的工作运行时间;节省地面空间;装配高速度、高重复定位精度;节省地面空间;超长的工作运行时间;防护等级高;手腕力矩大 1) 轴动作范围
系统主机是采用目前*前沿机器人控制技术,将机器人的伺服驱动控制、机器人控制系统、数据采集及通信、机器人专用硬件接口等进行模块化设计,实现了机器人的控制系统与驱动系统完美应用。 二、电控采用厚板设计理念,结实耐用。其中内含了新开发的硬件急停及MC使能单元的控制。 三、外部接口包括了IO端子、预留焊接专用端子、三工位操作盒接口、双外部轴接口、连接X1/X2的机器人本体插头。 3) 示教器 a) 便携式示教器
|
||||||||||||||||||||||||
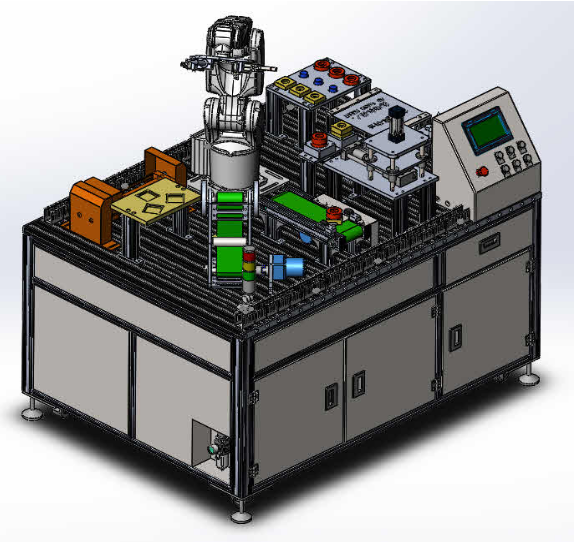
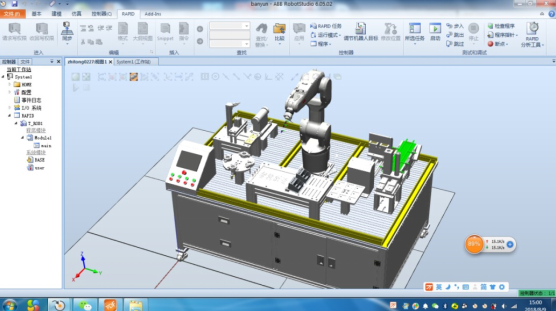
| 2 | 主机架 | 1600×1200×900mm工业铝型材搭建,钣金表面喷塑处理,带滚轮。 | ||||||||||||||||||||||||
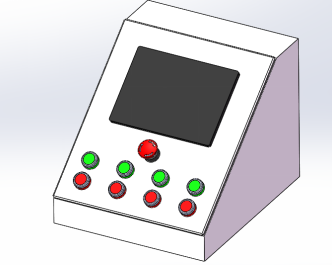
| 3 | 操作面板模块 | 操作面板上的元件:操作面板上的元件,电源指示灯,蜂鸣器等 | ||||||||||||||||||||||||
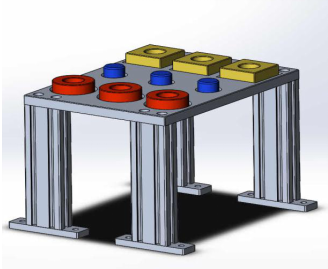
| 4 | 放料平台模块 | 实现物料搬运,九宫格分拣功能。 | ||||||||||||||||||||||||
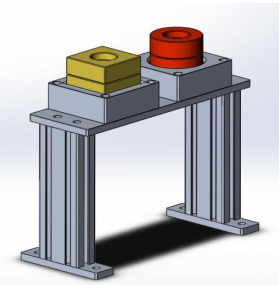
| 5 | 码垛仓库模块 | 由三层码垛平台组成,钣金喷塑,铝型材搭建 | ||||||||||||||||||||||||
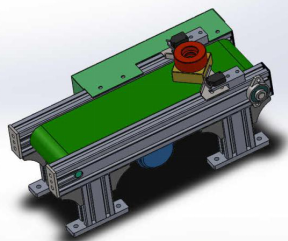
| 6 | 流水线模块 | 实现与输送物料自动化设备联动,实现自动搬运分类仓储等功能 | ||||||||||||||||||||||||
| 7 | TCP及工具架模块 | 实现TCP工具存储,TCP点的校准等功能。 | ||||||||||||||||||||||||
| 8 | 几何轨迹模块(TCP练习区) | A4纸大小,模板可按要求更换,模板上有矩形,三角形,圆,弧线灯,文字等轨迹,并配有楔型画笔 | ||||||||||||||||||||||||
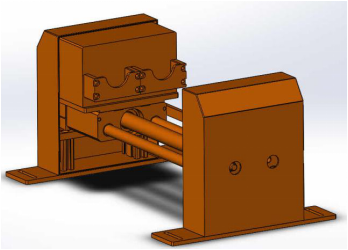
| 9 | 冲压模块 | 实现与冲压自动化设备联动,实现冲压设备自动搬运分类仓储等功能 | ||||||||||||||||||||||||
| 10 | 抛光打磨模块 | 模拟工厂比较通用的打磨砂轮 抛光砂轮 打磨皮带等打磨工艺。实现模拟打磨抛光等功能 | ||||||||||||||||||||||||
| 11 | 装配点胶模块 | 模拟工厂比较通用的二次定位轴孔装配,点胶等工艺。 | ||||||||||||||||||||||||
| 12 | 加工中心模块 | 模拟工厂比较通用的加工类设备上下料,上嵌件等工艺 | ||||||||||||||||||||||||
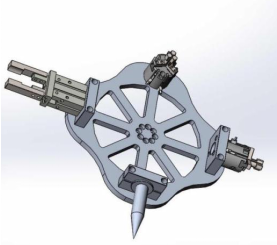
| 13 | 机器人夹具模块 | 实现物料吸取,TCP轨迹运行等功能。 | ||||||||||||||||||||||||
| 14 | PLC控制系统 | 控制规模:24点输入,24点输出;加扩充可扩展到128点。自带两路输入电位器,8000步存储容量,并且可以连接多种扩展模块,特殊功能模块。晶体管型主机单元能同时输出2点100KHz脉冲。并且配备有7条特殊的定位指令,包括零返回、绝对或相对地址表达方式及特殊脉冲输出控制。可安装显示模块FX1N-5DM,能监控和编辑定时器、计数器和数据寄存器。 网络和数据通信功能:支持232,485,422通讯。 | ||||||||||||||||||||||||
| 15 | 教学资源 | 配套说明书一份 |
|
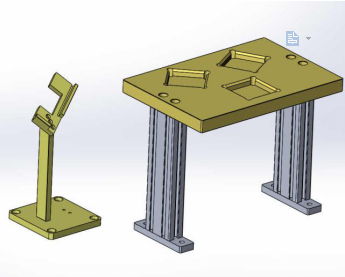
放料平台模块 Ø 搬运应用场景与工厂实际自动上下料相似; Ø 可进行机器人点位示教编程与调试; Ø 可根据学习内容不同设定不同的搬运方式; Ø 可根据工件不同采用不同的搬运夹具。 |
|
码垛模块 Ø 码垛应用场景与工厂实际纸箱码垛情况相似; Ø 可进行机器人点位示教编程与调试; Ø 可根据学习内容不同而设置不同码垛形式; Ø 可根据工件不同采用不同的夹取夹具。 |
|
流水线模块 Ø 流水线应用场景与工厂实际物流情况相似; Ø 可进行机器人点位示教编程与调试; Ø 可根据学习内容不同而设置不同挑选形式; Ø 可根据工件不同采用不同的夹取夹具。 |
|
TCP及工具架模块 Ø TCP示教点用于实现机器人基准定位; Ø 工具架用于存放机器人各种工具; Ø 可根据学习内容不同而选择工具; Ø 机器人可根据工件不同选择不同的工具。 |
|
几何轨迹模块 将工业机器人对产品装配前的涂胶工艺进行功能抽象化,机器人携带画笔工具模拟涂胶枪在3D 轨迹面板上完成固定的轨迹过程,如图 f 所示。保证工艺真实性同时增加教学性和趣味性。 |
|
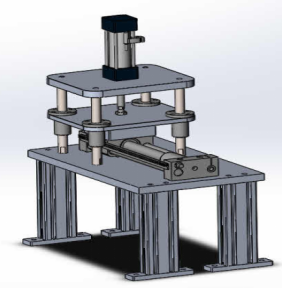
冲压模块 将工业机器人对产品冲压工艺进行功能抽象化,机器人携带夹治具将产品放入或取出冲压设备中产品,模拟完成冲压自动化生产的轨迹过程,如图g 所示。保证工艺真实性同时增加教学性和趣味性。 |

|
抛光打磨模块 将工业机器人对产品抛光打磨工艺进行功能抽象化,机器人携带夹治具将产品进行打磨或抛光,模拟完成抛光打磨自动化生产的轨迹过程,如图h 所示。保证工艺真实性同时增加教学性和趣味性。 |
|
装配点胶模块 将工业机器人对产品装配点胶工艺进行功能抽象化,机器人携带夹治具将产品进行二次定位后实现多个零件组合在一起并点胶,模拟完成装配点胶自动化生产的轨迹过程,如图I 所示。保证工艺真实性同时增加教学性和趣味性。 |
|
加工中心模块 将工业机器人对产品加工中心上下料工艺进行功能抽象化,机器人携带夹治具将产品放入或取出加工中心,模拟完成加工中心自动化生产的轨迹过程,如图J 所示。保证工艺真实性同时增加教学性和趣味性。 |
|
PLC控制模块 1.学会控制按钮的接线与定义说明 2.学会人机交互界面触摸屏的界面编写控制程序设定 3、学会PLC与机器人控制系统、平台工作模块进行电气控制 |
|
机器人夹具模块 Ø 采用多工位夹具设计; Ø 可根据产品形状实现夹取或吸盘方式; Ø 可根据学习内容不同联系不同工具是使用方法; Ø 可进行工具的二次开发。 |
| 其他配件 | |||
| 规格型号 | 产品图片 | 规格型号 | 产品图片 |
| 轨迹笔 |
 |
空气压缩机 |
 |
| 气动调压阀 |
 |
机器人夹治具 |
 |

