蜘蛛手工业机器人平台
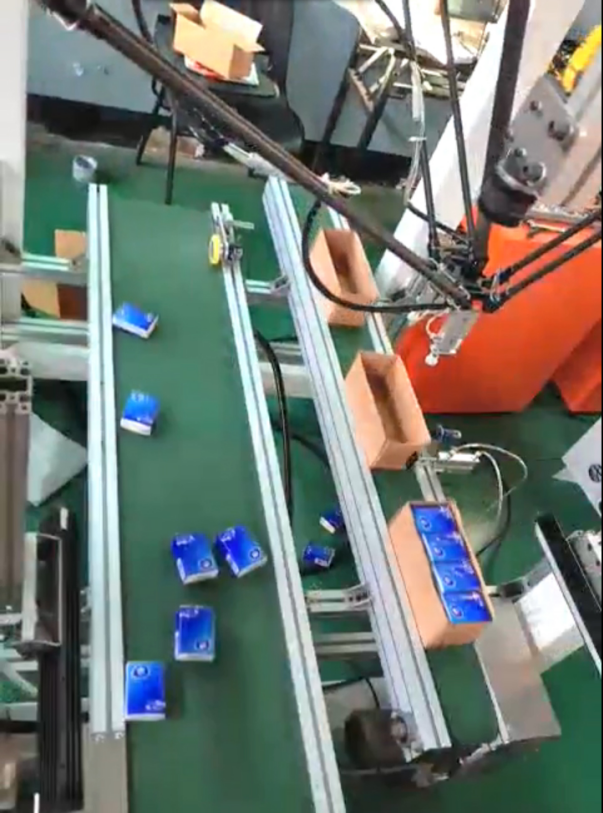
蜘蛛手工业机器人适用于各个行业的快速分拣排列或者装箱,集成智能视觉识别功能,具有良好的动态跟踪功能。负载1KG能够满足大多数需要快速分拣的产品。 DT_Catch软件集成视觉设置、工具设置、轨迹设置、码垛模块、标定模块为一体,简化操作过程,方便用户随时更改自己需要的程序。 成熟的运动控制技术,保证机器人系统的稳定性。关键运动部件采用进口成熟品牌,保证使用寿命。
特点:
1.精准定位:重复定位精度高达0.1mm。
2.视觉智能识别:机器人自带视觉系统,可对目标的形状、特征、姿态进行识别并准确定位。
3.传送带动态跟踪: 对视觉识别的目标进行动态捕捉,大大提高抓取效率。
4.高速: 空载抓取节拍可以达到140次/分钟(跨度400mm)
一、技术参数
|
工业机器人 |
|
|
|
四轴 |
|
笛卡尔坐标运行范围: |
R |
400mm半径 |
|
Z |
200mm |
|
各关节运行范围: |
J1 |
+5°/+125° |
|
J2 |
+5°/+125° |
|
J3 |
+5°/+125° |
|
J4 |
±360° |
|
运行节拍(25-400-25) |
140 |
|
重复定位精度 |
±0.1mm |
|
额定载荷 |
1kg |
|
电机功率 |
1-3轴 |
750W |
|
电机功率 |
第4轴 |
400W |
|
整机功率 |
3000W |
|
电压 |
380V |
|
I/O参数 |
数字量:24输入,32输出 |
|
IP等级 |
IP54 |
|
环境湿度 |
< 85% |
|
环境温度 |
1-45℃ |
|
整机重量 |
110kg |
|
安装方式 |
吊装 |
|
控制柜防护等级 |
IP53 |
|
控制柜尺寸 |
560(宽)×330(厚)×730(高) |
|
控制柜重量 |
45KG |
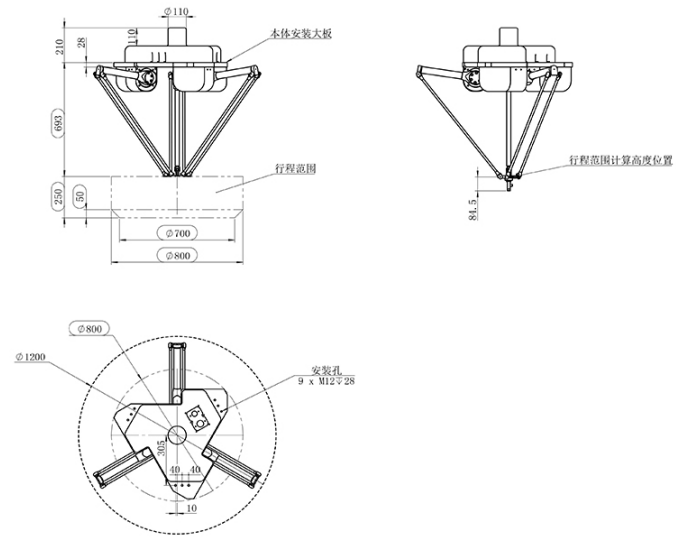
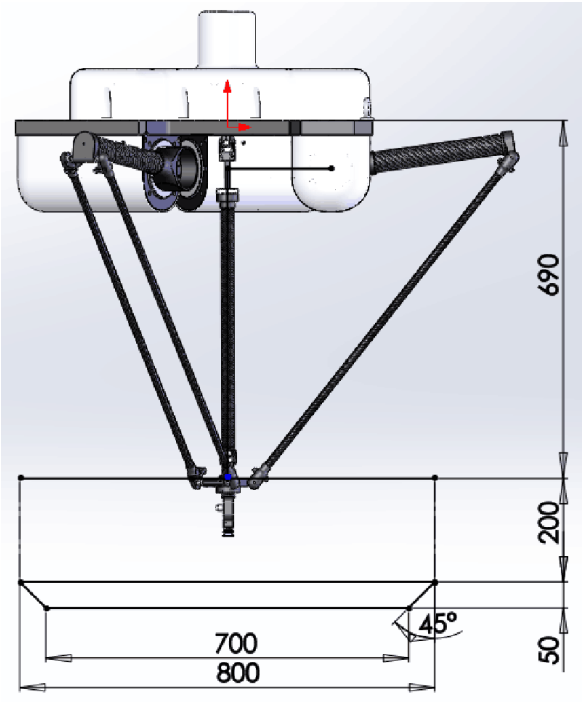
二、工业机器人参数图