





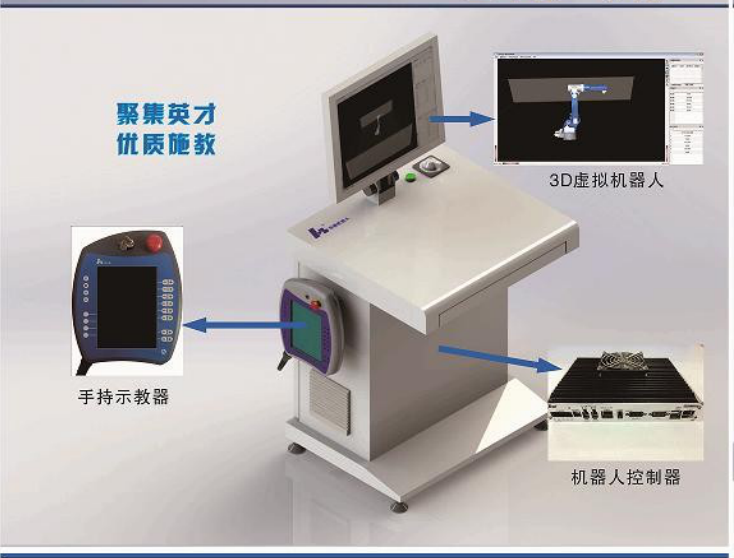
VS-8机器人理实一体化教学工作站 实训平台,由工业机器人控制系统、虚拟编程与仿真系统、示教器和PC机等相关软硬件组成,通过虚拟编程与仿真系统模拟出真实工业机器人环境,同时保留工业机器人控制系统与示教器,是工业机器人理论与实践教学相结合的实训平台。
机器人理实一体化是针对机器人教学的一款产品,具有成本低,安全性高优势。该产品能够通过示教器操作 PC 上的虚拟机器人进行运动控制,且运动过程中没有噪音。当教师从理论上讲解之后,学生就可以动手操作机器人,能够激发学生对机器人课堂学习的兴趣,提高学生和老师之间的互动性。
一、产品特点
1、一体机电脑,通讯模块要求:用于工业机器人手持盒与一体机电脑避行以太网通信。
2、可实现计算机和底层硬件的以太网通讯。
3、可实现计算机对底层硬件的数据读取,以及计算机对底层硬件数据的写入。
4、理实一体化平台可以模拟出所有机器人的应用场景。如上下料、五金打磨、位于喷涂、焊接加工等,并可在这些场景中进行离线或在线编程与仿真。
5、具有成本低,安全性高优势。
6、通过示教器操作控制 PC 上的虚拟机器人运动,运动过程中没有噪音。
7、理论上讲解后,学生可以动手操作机器人。
8、能够激发学生对机器人课堂学习的兴趣,提高师生互动性
二、配置清单:
|
序号 |
名称及规格 |
单位 |
数量 |
备注 |
|
1 |
一体化课桌平台 |
套 |
1 |
|
|
2 |
-体机电脑 |
台 |
1 |
|
|
3 |
机器人示截摒 |
套 |
1 |
|
|
4 |
平台电搜模组 |
套 |
1 |
|
|
5 |
机提入控制&IPC |
套 |
1 |
|
|
6 |
Robot RV软件 |
套 |
1 |
|
|
7 |
辅件 |
项 |
1 |
三、功能介绍:(具体功能如下)
1. 实现了计算机和底层硬件的以太网通讯;
2. 实现了计算机对底层硬件的数据读取,以及计算机对底层硬件数据 的写入;
3. 机器人模型显示功能;
4. 实时数据的显示;
5、动态添加机器人模型;
6、重启控制器功能;
7、机器人模型以不同方式显示;
四、特点:
1. 可以动态添加机器人模型并显示;
2. 该软件可以用真实示教器模拟虚拟机器人的运动;
3. 机器人数据实时显示;
平台要求用真实的示教器和真实的控制器控制模拟软件上的虚
拟机器人,模仿真实的机器人运动。省去伺服驱动、减速器、电机、
机器人本体,节省成本。对于教学产品来说,安全性是很重要的,
由于没有使用实际的机器人本体,所以不存在安全隐患。
五、HSPad 示教器
一、 8 寸彩色多点触摸屏,辅助实体功能按键,部分功能键可自定 义
二. 支持手动、自动三挡运行模式,具备三段式安全开关,*大 限度保证安全
三. 简单方便的编程界面,可实现快速示教编程
四. 完善的报警机制和检查方法,方便现场故障排查
五. 自动记录故障报警、操作历史以及网络状态
六. 支持 USB 进行程序备份、恢复与升级可选码垛、打磨、喷涂 等多种工艺应用包。
产品特色如下:
1:8 寸彩色多点触摸屏,辅助实体功能按键,部分功能键可自定 义
2:完善的报警机制和检查方法,方便现场故障排查
3:支持 USB 进行程序备份、恢复与升级可选码垛、打磨、喷涂 等多种工艺应用包
4:支持手动、自动三挡运行模式,具备三段式安全开关,*大 限度保证安全
5:简单方便的编程界面,可实现快速示教编程
6:自动记录故障报警、操作历史以及网络状态
六、硬件介绍:整个系统由示教器、PC、控制器、路由器等组成。其中 示教器、PC、控制器都是通过路由器互相通信。示教器通过路由器 给控制器发送命令,控制器通过该命令控制 PC 上的虚拟机器人;
七、运行环境:操作系统Windows 7,运行环境Microsoft .Net 4.0, 主板带有网卡的主板,网络为普通以太网连接;
八、软件介绍:软件系统分为四个模块:通信模块,机器人模型导入模 块,外部运动控制模块,数据显示模块。其中通信模块包括设备扫描,建立连接以及断开连接;机器人模型导入模块包括是确定机器人机械坐标系、DH 参数设置、检查是否有对应的机器人模型数据;外部运动控制模块指的是利用示教器控制虚拟机器人运动,包括外部启动和外部停止;数据显示模块包括设备信息显示、关节坐标显示、笛卡尔坐标显示以及机器人模型显示。
九、技术参数
|
长×宽× 高 |
600mm×500mm×1189mm |
|
|
额定功率 |
120W |
|
|
额定电压 |
220V |
|
|
额定电流 |
10A |
|
|
*大控制轴数 |
6 |
|
|
控制模式 |
自动模式、手动模式 |
|
|
温度 |
-20°~ 45° |
|
|
适用环境 |
湿度 |
20% ~ 80% |
|
其他 |
避免与易燃易爆或腐蚀性气体、液体解除,远离 电子噪声源(等离子) |
|
|
安装方式 |
地面安装 |
|
|
产品重量 |
60kg |
|
十、产品案例


