机器人机械手-S406
一、产品介绍
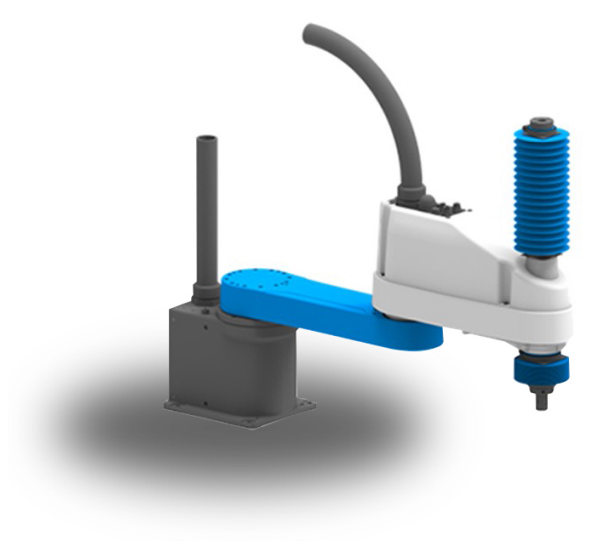
406型 SCARA机器人可以在高速运行时承担较高负载,非常适用于需要更大工作范围或更高有效负载同时拥高速度、低价格的应用。机器人时重物取放、包装、机器装载/卸载等方案的理想选择。
机器人机械手-406特性:负载高达6Kg,额定负载为2Kg。*大工作半径600mm。
二、
产品特点
1、重量轻
2、运行速度快
3、外型美观
4、重复定位精度高
5、高速循环时间使零部件吞吐量得到提升
6、出色的加/减速率,平稳的启动/停止
三、产品应用
搬运货物
1、更大的灵活性,更稳定的性能、更低的能耗;
2、具有高速性的*大化吞吐量;
3、超长的工作运行时间;
4、节省地面空间;
装配
1、高速度、高重复定位精度;
2、节省地面空间;
3、超长的工作运行时间;
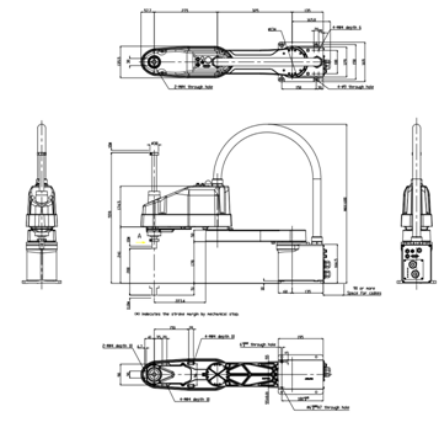
四、技术参数
|
型 号 |
406 |
|
手腕负载 |
额定 2 kg |
|
*大 6 kg |
|
*大工作半径 |
600mm |
|
自由度 |
4 |
|
关节速度 |
J1 |
6,800 mm/s |
|
J2 |
6,800 mm/s |
|
J3 |
1,100 mm/s |
|
J4 |
2,000 deg/s |
|
关节范围 |
J1 |
±132° |
|
J2 |
±150° |
|
J3 |
"+40°/- 220° |
|
J4 |
±180° |
|
重量 |
18kg |
|
重复定位精度 |
±0.05mm |
|
工作温度 |
0-40℃ |
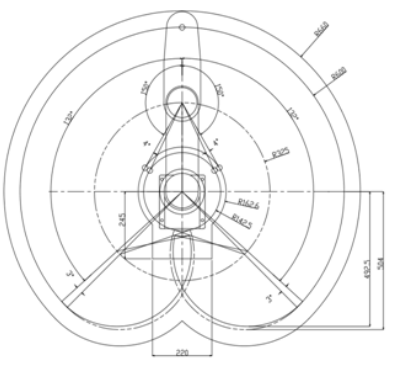
五、
工作空间