VS-1633B型工业机器人循环生产线实训装备
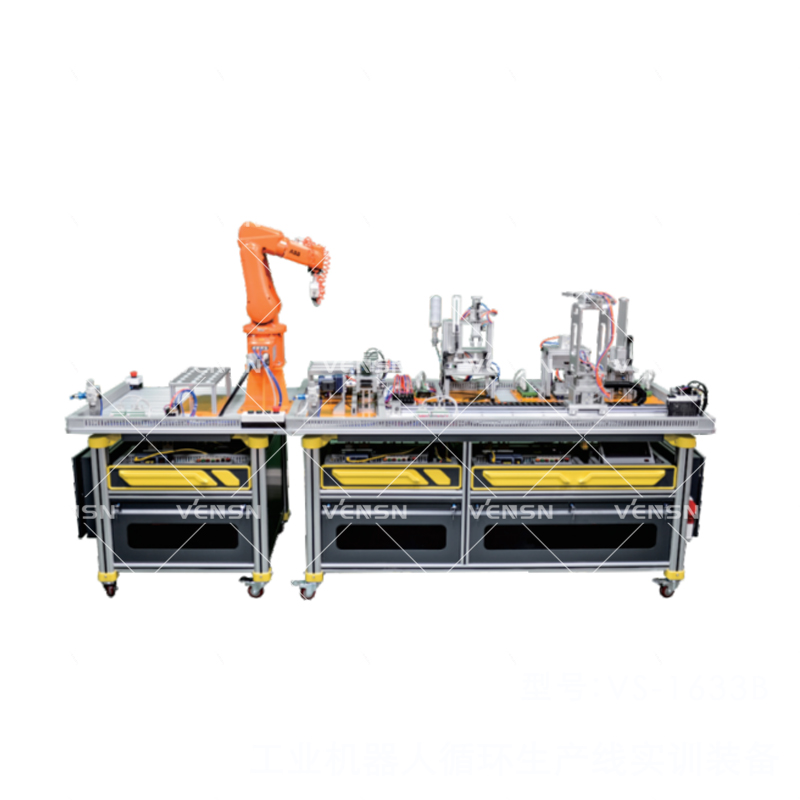
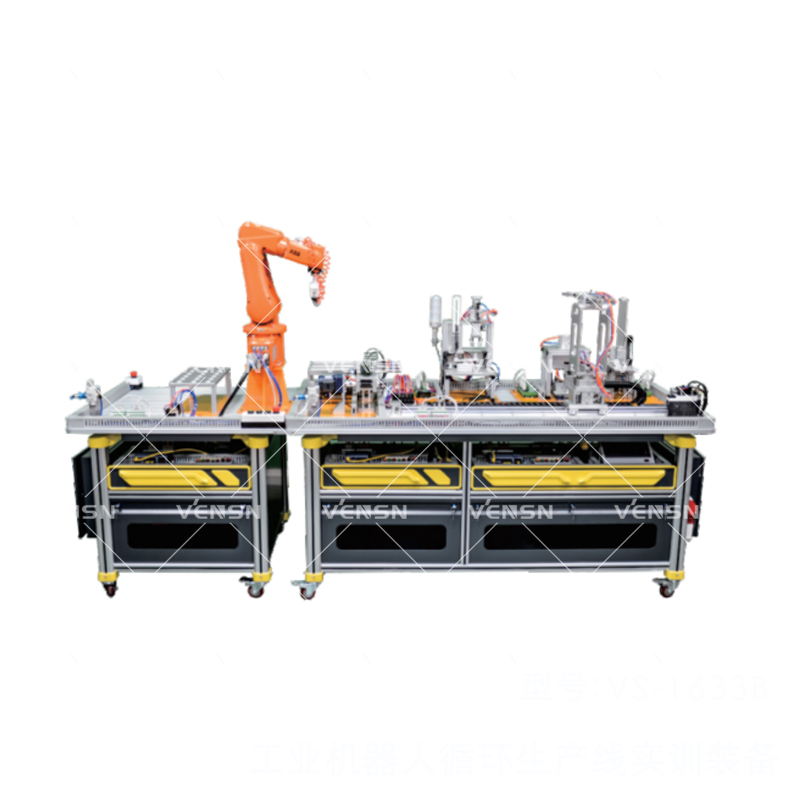
一、设备外观图
二、设备概述
VS-1633B型工业机器人循环生产线实训装备采用1+1组合式结构分别由安装在铝合金导轨式的实训台上的送料单元、加工单元、装配单元、双层输送单元、分拣单元5个单元,加上由铝合金导轨式的实训台上工业机器人码垛单元两大部分组合成多种组合方式的实训装备。电气布局采用抽屉式,所有其电气控制器都安装在网孔板式的抽屉上,这种机电分离的格式更加符合了工业实际情况。外观如上图所示。
其中,每一工作单元都可自成一个独立的系统,同时也都是一个机电一体化的系统。各个单元的执行机构基本上以气动执行机构为主,但输送单元的机械手装置整体运动则采取伺服电机驱动、精密定位的位置控制,该驱动系统具有长行程、多定位点的特点,是一个典型的一维位置控制系统。分拣单元的传送带驱动则采用了通用变频器驱动三相异步电动机的交流传动装置,对物料进行分拣。码垛单元使用的是工业机器人,对物料进行入库和拆分出库。机器人控制技术、伺服位置定位控制和变频器技术是现代工业企业应用最为广泛的自动化控制技术。
在VS-1633B设备上应用了多种类型的传感器,分别用于判断物体的运动位置、物体通过的状态、物体的颜色及材质等。传感器技术是机电一体化技术中的关键技术之一,是现代工业实现高度自动化的前提之一。
在控制方面,VS-1633B的标准配置采用了基于RS485串行通信的PLC网络控制方案,即每一工作单元由一台PLC承担其控制任务,各PLC之间通过RS485串行通讯实现互连的分布式控制方式。用户可根据需要选择不同厂家的PLC及其所支持的通信模式,组建成一个小型的PLC网络。小型PLC网络以其结构简单,价格低廉的特点在小型自动生产线仍然有着广泛的应用,在现代工业网络通信中仍占据相当的份额。另一方面,掌握基于RS485串行通信的PLC网络技术,将为进一步学习现场总线技术、工业以太网技术等打下了良好的基础。






 电话:021-55151269
电话:021-55151269 邮箱:vensn88@163.com
邮箱:vensn88@163.com 在线QQ:
在线QQ:

