VS-1695B型协作机器人智能分拣实训装置
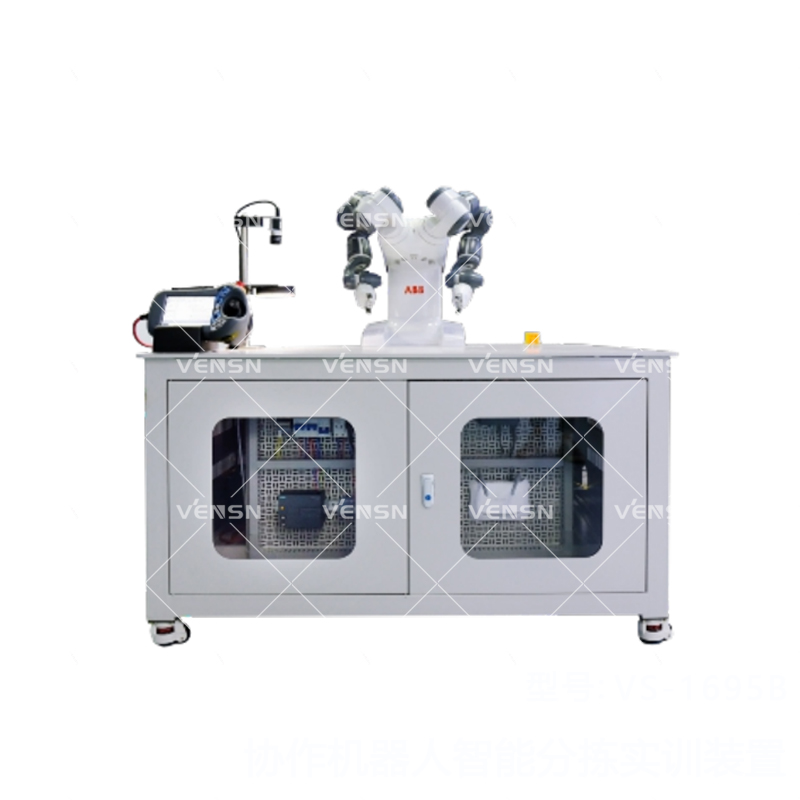
一、设备外观图

二、设备概述
VS-1695B型双臂协作机器人智能分拣工作站(后简称为VS-1695B)工程技术含量高,其机器人及操作系统采用ABB公司IRB14000型号的双臂协作机器人平台,融合了最先进的自动化技术、电气控制技术、工业机器人编程技术、工业机器人操控技术、传感器技术等,具有教学功能丰富、可操作性高、使用方便、安装简单、维护容易等特点。
该工作站则是利用双臂协作机器人的高灵活性及安全性来完成人机协作式的标准三阶魔方的还原工作。在设备中,工业机器人通过PC-Interface与工业视觉系统进行Socket通信连接。机器人夹持色块混乱的魔方至工业视觉相机下对三阶魔方的六个表面进行颜色识别,识别后相机将颜色数据传回至机器人端进行数据解析,解析完成后机器人端将解析完成后的颜色数据上传至PC端进行魔方还原步骤的计算,当PC端计算完成后通过通信端口再将魔方还原的步骤传输到工业机器人端,机器人对三阶魔方的还原步骤进行解析,解析完成后利用MultiMove®技术协同双臂对魔方进行还原工作。
VS-1695B型双臂协作机器人智能分拣工作站结构简洁、功能全面,其中包含有诸多设备通信、人机协作的相关内容。
三、技术参数
1.输入电源:单相 AC 220V±10% 50HZ;
2.输入功率:≤1kw;
3.工作环境:使用温度:0~40℃;保存温度:-10~65℃;使用湿度:90%以下(无结露);空气清洁,无腐蚀性及爆炸性气体,无导电及能破坏绝缘的尘埃;
4.重量:100KG;
5.外形尺寸:长×宽×高=1440mm×1280mm×1500mm
6.本质安全:具有接地保护、漏电保护功能,安全性符合相关的国家标准。






 电话:021-55151269
电话:021-55151269 邮箱:vensn88@163.com
邮箱:vensn88@163.com 在线QQ:
在线QQ:

