一、平台概述
VSQ-Z110型智能协作机器人技术及应用综合实训平台是面向教育培训领域所设计的一款教学实训、技能培训与 考核一体化的综合实训平台。平台基于 6 轴智能协作机器人,配备丰富的模块化的工装设备,可根据课程 内容设置岗位技能要求,工作任务灵活搭配不同的功能模块,具有简单易用、操作安全、模块化可扩展等特点。

二、功能特征
1、技术参数
(1)输入电源: 单相三线 220V±10% 50Hz
(2)工作环境: 温度- 10℃~+40℃
(3)相对湿度≤85%(25℃)
(4)海拔<4000m
(5)装置容量: <1.5kVA
(6)平台尺寸: 1500mm ×1200mm ×855mm (由 1500mm*600mm*855mm 两台拼接而成)
(7)建议占地面积: 3 米×2 米(含电脑桌)
(8)安全保护: 具有漏电保护,安全符合国家标准
三、特色功能
VSQ-Z110型智能协作机器人技术及应用综合实训平台以模块化、递进式、可扩展、可升级为原则,对接“三教” 改革新需求,打造课证、书证融通新模式,提供配套完善的教材、课程教学与实训体系,可满足高校机器人相关专业的教学实训,科研创新、职业技能等级证书培训与考核等需求。
工作台整体由两个基础台拼接而成,更具空间灵活,拆卸方便等特点。台面采用标准铝型材,机器人 及功能模块可根据需求改变布局位置,所有功能模块采用手拧螺栓方式固定,可实现无工具快速拆装与更 换。每个模块电气部分配置了独立的电气接线盒和快速航插,可实现模块整体机械和电气快速安装部署, 还可根据需求更换或添加功能模块进行功能扩展。
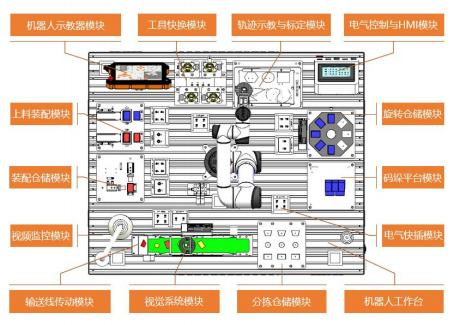
模块布置图
四、设备与功能模块
1、智能协作机器人

智能协作机器人系统
产品特点:
(1)协作安全
具有灵敏的力度反馈特性,特有的碰撞监测功能,工作中一旦与人发生碰撞,便会立刻自动停止,无 需安装防护栏,在保障人身安全的前提下,实现人与机器人的协同作业。

人机协作安全
(2)高精度与灵敏度
机器人的重复定位精度可达±0.02mm ,适用于各种自动化中对精度有高度要求的工作。轻质量小型化 的身材,面对不同的应用场景,也能快速部署和设置。
机器人重复定位测试
(3)单易操作
用户可直接通过手动拖拽来设置机器人的运行轨迹。可视化的图形操作界面,让非专业用户也能快速 掌握。

机器人拖拽示教
(4)模块化
机器人的额定使用寿命为 25000 小时,即便是在工作超负荷,环境恶劣的情况下,也可正常运行,模 块化的设计理念,让机器人的维修与保养更加快速与便捷。关节模块一旦出现故障,用户可在极短的时间 内进行更换。
(5)实用性
包含了工业机器人搬运、上下料、码垛等常用工艺,集成了 IO 通信和 PLC 配合控制以及视觉跟踪等高 端技能,便于技术人员熟悉了解其他应用方式工业机器人工作站的配置和操作,有助于提高技术人员综合
实践能力。
(6)智能与开放
系统支持多种形式的应用编程接口,提供多种平台 SDK 开发包,支持 Linux 下 C/C++编程、Lua 脚本 语言编程、Windows VC++ 、Python 脚本编程、QT 跨平台编程开发。
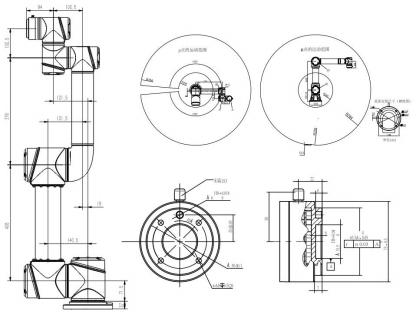
(7)机器人尺寸及工作范围
2、机器人工作台
机器人工作台是机器人与不同功能模块安装固定的基础平台。平台尺寸为 1500mm ×1200mm ×855mm。 可拆分成两个小平台,机器人和功能模块可在工作台上快速、灵活安装,可以根据教学和实训课程的具体 要求,在工作台上安装不同的功能模块。

机器人工作台
3、轨迹标定模块
轨迹标定模块可练习协作机器人的基本指令与编程,平面轨迹板采用可更换的 A4 纸设计,可任意添加 变换轨迹图形,丰富的教学实训内容,轨迹标定模块可实现相关功能如下:
作业平面: 支持 0°15°、30°45°倾斜切换;
运动轨迹: 轨迹运动、直线运动、圆运动、圆弧运动、曲线运动等;
运动方式: 坐标平移、坐标旋转;
标定方式: TCP 标定。

轨迹标定模块
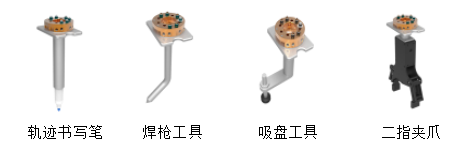
4、工具快换模块
平台配套高精度机器人工具快换装置,可实现协作机器人自动更换不同的末端执行工具,实现平台中 机器人不同的功能的扩展,进行相应的技术应用。

工具快换模块
末端工具支持包含二指夹爪末端、模拟焊枪末端、吸盘手爪末端、轨迹书写笔末端,还可以支持扩展
或更换其他类型工具,如气动手爪,柔性软体手爪等。
5、装配仓储模块
装配料仓模块仓储部分采用井式弹出式物料仓储设计,双物料弹夹可储存两种不同物料,底部采用气 缸驱动弹出,配有物料光电感应器,实时反馈料仓物料状态。
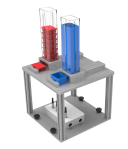
装配仓储模块
6、装配定位模块
装配定位模块配合装配仓储模块,可用来进行机器人物料搬运、装配工艺学习,共包含双向定位气缸, 可精确定位装配物料位置,同时气缸安装状态磁性开关,实时反馈气缸状态。
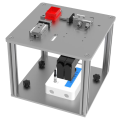
装配仓储模块
7、分拣输送线模块
分拣输送线模块由铝合金作为支架,伺服电机驱动,同步带轮传动,机器人通过视觉系统可对输送线 上的随机物料进行分拣。同时设有固定视觉和动态抓取元件的扩展安装位置,可进一步扩展机器视技术的 应用与学习。
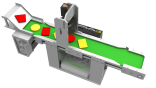
分拣输送线模块
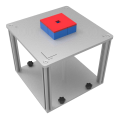
8、分拣仓储模块
分拣仓储模块配合分拣输送线模块,可用来进行机器人物料搬运,码盘工艺学习,共包含 9 个仓位, 采用仿形定位,对应三种不同物料。每个穴位都装有物料感应器,实时反馈仓储物料状态。

分拣仓储模块
9、视觉系统模块
(1) 工业相机:

功能特性:
支持自动或手动调节增益、曝光时间、LUT 、Gamma 校正等
采用千兆网接口,无中继情况下,最大传输距离可到 100m
兼容 GigE Vision 1.2 协议及 GenlCam 标准,无缝接入第三方软件平台
(2) 视觉算法平台:
机器视觉算法平台集成机器视觉多种算法组件,适用多种应用场景,可快速组合算法,实现对工件或 被测物的查找、测量、缺陷检测等。

视觉算法平台软件
(3) SDK 二次开发
SDK 提供两套接口: C/C++接口和 C#接口,分别为 C/C++接口和 C#接口提供了相应 Demo ,可以参考 Demo 查看接口的使用方法。

SDK 编程开发
10、旋转仓储模块
仓储由高精密电机驱动,具有旋转送料功能。具有 8 个货位,物料层采用卡环结构,方便拆卸,拼装, 设有金属感应器和光电传感器,实时反馈仓储位置和物料状态。

旋转仓储模块
11、码垛平台模块
码垛平台模块配合旋转仓储使用,学生可通过机器人对旋转仓储中的物料进行不同的垛型设计和码垛 练习。支持多种垛型,让学生不仅可以学习机器人在包装码垛类应用场景的调试和应用,还可发散思维, 发挥创造力,设计新型独特的工业垛型。
码垛平台模块
12、电气控制模块
实训平台的电控系统主要采用主流系列 PLC ,配套 7 寸 HMI 触摸屏。实训平台配有可快速插拔的电气 接线面板,功能分区、快速航插设计、文字标注,每个模块配有独立的电气接线盒,可直观教学电气接线方法及原理。

触摸屏控制模块 电气快插接线盒
以上为高级实训平台选配
13、复合机器人
复合机器人采用 SLAM 激光自主导航 AGV 搭载轻型 6 轴协作机械臂,配有视觉系统与末端夹爪工具, 可自主工作、无轨导航。平台支持自建场景地图应用,可实现工件定位抓取、移动上下料等功能。

复合机器人
14、智能仓储单元
智能仓储单元采用单层 4×4 行列立体货架形式,配有托盘检测传感器与二维码信息检测标签,主要用 于原料工件与包装盒工件、成品工件的仓储管理。
智能仓储等单元
五、实训项目
1、平台基本操作实训
(1)考培平台上电
(2)操作面板基本操作
2、机器人基础实训
(1)机器人硬件结构认知
(2)机器人安装与调试实训
(3)机器人示教控制实训
(4)机器人 IO 信号控制实训
(5)机器人在线指令编程
(6)机器人拖动示教控制
3、电气基础实训
(1)西门子 1200plc 及博图软件
(2)威纶通触摸屏及 EBpro 软件
(3)传感器的原理及实训
(4)气缸与电磁阀实训
(5)伺服电机与编程控制实训
4、视觉基础实训
(1)认知视觉硬件及软件
(2)硬件的连接与通讯
(3)图像采集
(4)视觉定位
(5)视觉标定
(6)条形码与二维码识别
(7)字符定位与识别
(8)几何测量
5、离线编程仿真实训
(1)机器人仿真操作
(2)工具设置与控制仿真
(3)零件校准与抓取仿真
(4)轨迹编辑与规划仿真
(5)工作站系统建模仿真
6、脚本开发与二次编程
(1)机器人脚本编程开发
(2)python 编程与机器人控制
(3)基于 SDK 的 C 编程机器人运动控制
(4)机器人状态信息远程采集与运维监控
7、综合实训案例
(1)电气系统的连接
(2)PLC 电气控制程序
(3)基于考培平台的搬运、装配行业案例
(4)基于考培平台的搬运、码垛行业案例
(5)基于机器视觉的上下料行业案例
(6)基于视觉的工件分拣行业案例









 电话:021-55151269
电话:021-55151269 邮箱:vensn88@163.com
邮箱:vensn88@163.com 在线QQ:
在线QQ: