
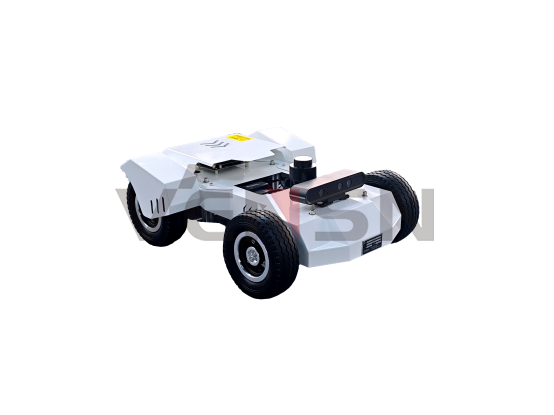
一、智能网联微缩车介绍
智能网联教具车采用阿克曼转向的线控底盘,搭载 360 度扫描式激光雷达、惯性陀螺仪、视觉摄像头,实现室内场景导航、循迹、避障、绕障、遵守交通标识等自动驾驶功能。采用先进的AI人工智能计算平台,可进行图像识别、SLAM定位、环境感知、障碍物探测、交通标识识别、多传感器融合、自动驾驶决策与控制等教学和研究,并支持二次开发。
二、主要功能
采用阿克曼结构,提供CAN线控协议,贴近智能网联汽车形态,可进行汽车线控底盘结构原理教学;
控制系统与L4自动驾驶系统框架类似,可学习感知、定位、规划、控制四大自动驾驶模块工作方式;
提供建图工具,建立具有交通规则信息的行驶地图,微缩车可依据地图自主行驶到任意目标点;
可基于联动展示台,实现AVP代客泊车倒车入库;
可实现网约车定点约车、送客等定位路径规划自动驾驶;
可基于联动展示台,实现车路协同、识别交通设施、识别行人等功能;
三、主要规格
1、小车底盘基本参数
尺寸:长*宽*高233*191*146
供电接口:5V和12V供电接口。
前转向舵机,后轮驱动。
带电池,控制板,和遥控器,可实现遥控驾驶。
2、环境感知部件
1.激光雷达
测量距离:0.15-12m
扫描角度:0-360度
测距分辨率:<0.5
角度分辨率:<=1度
测量频率:2000-8000Hz
扫描频率:1—10HZ
3、 IMU
类型:九轴传感器,加速度计,陀螺仪和磁强计
板载能力:板载ATmega328处理并通过串行流发送的所有传感器的输出
数据输出:支持FTDI、蓝牙、Xbee
输入电压:3.5-16DC
4、摄像头
最大分辨率: 1920*1080
5、控制器
CPU:ARM Cortex-A78AEV8.2 64bit@1.5GHz(六核)
GPU:搭载16个TensorCore的512核NVIDAAAmpere架构GPU@625Mhz
算力:20TOPS
内存:4GB 64-bit LPDDR5、34 GB/S
USB接口:3×USB3.0+1 USB2.0+1 Type-C
视频编码:1080p30由1-2个CPU核心提供支持
视频解码:H.265(4K60,2×4K30,5×1080p60,11×1080p30)
GPIO引脚数:40
四、实训内容
1. 机器人底层功能
底层ROS串口通信
预留CAN通信接口
IMU与里程数据反馈
电池电压检测与电压报警
支持串口一键下载
陀螺仪零点漂移清除
场景机器人底盘运动学分析
航模遥控使用
常见电路保护功能
2. 建图导航相关功能
机器人动态避障
机器人定点导航
机器人多点导航
TEB与DWA路径规划
激光雷达角度屏蔽
激光雷达建图导航
rtab纯视觉建图导航
rtab视觉+雷达建图导航
Gmapping建图
Hector建图
Karto建图
Cartographer建图
RRT自主建图
机器人编队(领航者算法)
机器人编队切换
机器人编队避障
Cartographer3D三维重建
LIO-SAM三维重建
LeGO-LOAM三维重建
3. 人机交互相关功能
键盘节点控制
APP重力感应控制
APP调节PID参数
ROSAPP图传与控制
ROS APP建图
ROS APP导航
声源定位
语音召唤
语音控制
语音导航
语音播报
语音交互
激光雷达跟随
TTS文本转音频功能
ROS Ot功能
4. 视觉处理相关功能
opencv应用与教程
网页摄像头监控
深度视觉跟随
KCF跟随
AR标签识别
RGB视觉巡线(融合雷达避障)
人体骨架识别
人体骨架跟随
3D视觉姿态控制
3D视觉建图
3D视觉导航
ORB视觉建图功能
5. 深度学习相关功能
YOLO物体识别
YOLO手势识别
YOLO交通标志识别
深度学习模型训练
手势控制
沙盘地图自动驾驶
Tensorflow物体识别
Tensorflow目标检测
Tensorflow手写数字识别








 电话:021-55151269
电话:021-55151269 邮箱:vensn88@163.com
邮箱:vensn88@163.com 在线QQ:
在线QQ: