
一、功能描述
智能网联实训车开发平台采用线控底盘,搭载 360 度扫描式激光雷达、前视智能视觉感知设备、毫米波雷达、集成惯性陀螺仪和GNSS 的组合定位单元、超声波雷达,实现多场景导航、循迹、遵守交通标识等自动驾驶功能,可完成自动驾驶功能演示、传感器安装调试实训、高级辅助驾驶功能实训等。
二、环境感知系统平台
(一)环境感知系统通过智能驾驶装调实训平台集成并感知道路环境,自动规划行车路线并控制车辆到达预定目标的智能汽车。集自动控制、人工智能、视觉识别,传感器融合等众多技术。众多传感器集成于高扩展硬件结构平台,预留硬件扩展连接孔位,合理规划传感器可选位置。
(二)环境感知系统包含自动驾驶处理器、定位导航主机、激光雷达、超声波雷达、视觉感知设备、毫米波雷达等设备。通过该平台可以训练学生传感器集成,传感器标定,地图制作,路径规划等项目。
(三)结合自动驾驶控制系统、线控底盘等系统实现 L4 级别自动驾驶,自动避障,紧急停障,自动规划行驶路径等功能的完整条件。可实现传感器设备的配置、标定实验。
(四)传感器配置
1、计算单元
2、前视视觉感知设备
3、16 线激光雷达
4、组合定位单元
5、毫米波雷达
6、超声波雷达
7、显示屏
8、路由器
9、CAN 收发器
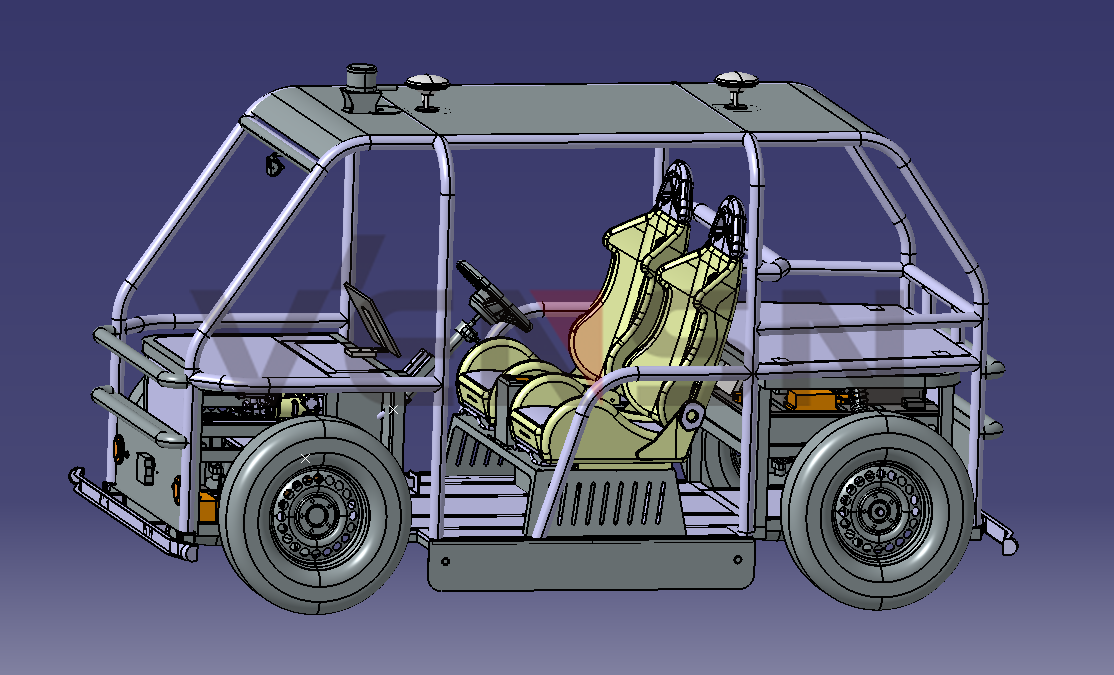
三、线控底盘
1.汽车级别:低速车辆
2.能源类型:纯电动
3.车辆规格:长:≥3170mm,宽:≥1650mm,高:≥1600mm
4.最大承重:≥300kg
5.最小转弯半径:≥2500mm
6.离地间隙:≥200mm,
7.轴距:≥2090mm,
8.轮距:≥1600mm
9.续航里程:≥100km
10.座位数量:≥2
11.爬坡能力:30%
12.线控油门
13. 线控刹车
14. 线控转向
15. 线控档位
16. 状态反馈
17. 线控模式
18. 线控接管
四、自动驾驶软件功能
1、自动驾驶系统可实现依靠高精地图进行 L4 自动驾驶功能,并可实现主动循迹、障碍物识别、主动刹车、站点停靠、局部路径规划等功能;
2、提供车辆行驶参数的设置控件,可对自动驾驶系统的形式策略进行调整,可做如车道保持 LKA、自动紧急制动 AEB 等 ADAS 功能;
3、自动驾驶系统具备生成高精地图信息源的程序,可录制点云数据包,并可使用地图制作软件制作高精地图;
4、提供各种传感器单独应用的实训软件,可对传感器进行逐一教学;
5、自动驾驶系统结合多种定位技术,可在室内实现循迹或依靠高精地图行驶。
五、提供车载传感器实训软件
1、统一平台实训软件
为保证系统一致性,所有测调实训软件运行于Linux系统环境下。
2、激光雷达部分
通过上位机软件设置激光雷达参数,包括以太网、时间、电机参数等;接收激光雷达数据流,可视化显示点云等。
3、摄像头部分
通过软件进行摄像头的内参标定,生成标定文件;可加载不同的标定文件,观察摄像头的畸变矫正效果等。
4、毫米波部分
系统提供人机友好交流界面,可实时更改雷达参数设置,观测调试效果。可准确识别静态与动态障碍物,显示距离、速度、位置等数据。
5、超声波雷达部分
通过发送不同指令,超声波模块可返回不同探测模式的数据,可演示不同探测模式下的探测精度和探测范围。
6、高精地图制图软件
使用内置软件,生成高精地图源信息;使用地图制作软件,制作高精地图
六、实训项目
1、智能驾驶车辆感知传感器集成配置实训
2、毫米波雷达的装配
3、毫米波雷达的参数调整
4、毫米波雷达的联机测试
5、视觉传感器的装配
6、视觉传感器的参数调整
7、视觉传感器的联机测试
8、激光雷达的装配
9、激光雷达的组网
10、激光雷达的联机调试
11、激光雷达的参数调整
12、组合导航的装配
13、组合导航的联机调试、校准
14、组合导航的参数调整
15、超声波雷达的装配
16、超声波雷达的联机调试
17、智能传感器常用检修工具的使用
18、智能驾驶车辆感知传感器标定实训
19、智能驾驶车辆底盘线控制动系统实训
20、对底盘线控制动系统机械与电路部件的安装或改装实训
21、线控制动系统 CAN 报文解析
22、智能驾驶车辆底盘线控转向系统实训
23、对底盘线控转向系统机械与电路部件的安装或改装实训
24、线控转向 CAN 报文解析
25、转角信号稳态误差测试
26、最低响应目标转角测试
27、线控转向系统零位标定
28、对线控驱动、制动、转向系统进行参数配置、二次开发、功能配置








 电话:021-55151269
电话:021-55151269 邮箱:vensn88@163.com
邮箱:vensn88@163.com 在线QQ:
在线QQ: