
一、产品参数
1.每套系统由一个工业级16线激光雷达传感器、一个高清摄像头、一套便携式数据接收设备、一套可移动式安装支架和一套数据分析系统组成。
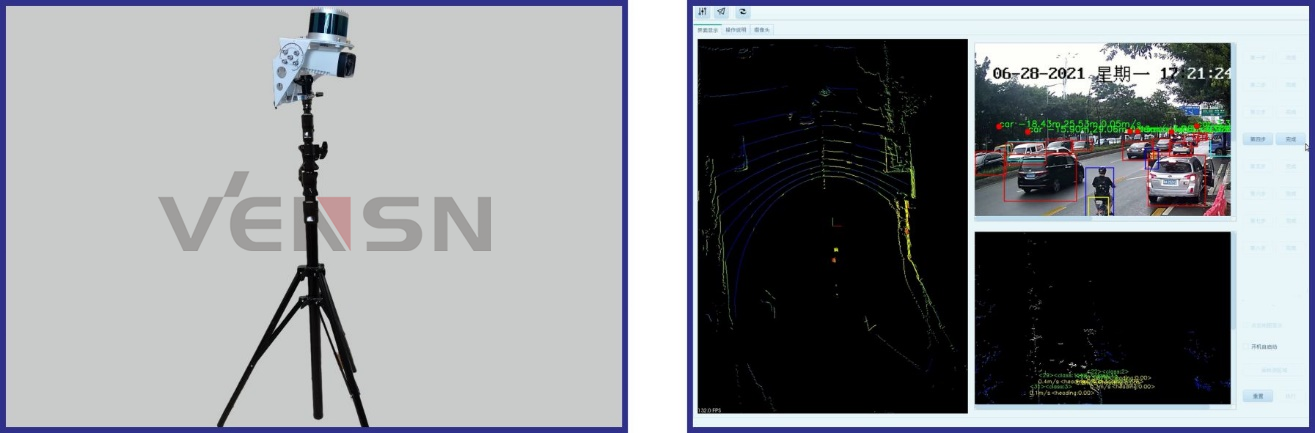
2.系统采用了激光雷达和视频融合技术,可实现交叉口的全息道路建模,交通信息采集,机动车、非机动车和行人的目标跟踪,车辆速度,车型等分析处理功能。
3.工业级16线激光雷达传感器要求不低于以下配置:线数16;水平视场角360°;垂直视场角30°;测距那里150米;水平角分辨率0.1°/0.2°/0.4°;垂直角分辨率2.0°;盲区≤0.4m;帧率5Hz/10Hz/20Hz;转速300/600/1200rpm;精度±2cm;以太网输出100Mbps;UDP数据包内容:三维空间坐标、反射强度、时间戳等;功率12W;防护等级IP67。
4.高清摄像头要求不低于以下配置:1/2.7" Progressive Scan CMOS;有效像素:200万,1920X1080;视频压缩:H.264;镜头:4mm;;含安装支架。
5.便携式数据接收设备要求不低于以下配置:CPU I5;内存8G;SSD硬盘256G;独显2G;可运行Linux操作系统。
6.可移动式安装支架要求不低于以下配置:4.8米高伸缩;含移动供电电源,可供系统连续工作时间不少于5小时。
7.数据分析系统要求不低于以下配置:可查看激光扫描点云动态图,获取点云原始数据,进行车辆信息检测和分析。可输出机动车、 非机动车、 行人等的类型、方位、 距离、 速度、运动方向及流量等信息。同时,可根据实际路况场景做进一步警告威胁判断,如管制道路异物入侵警告、 盲点警告等等,适用于各种复杂路段实现全方位无死角的监测覆盖。可以实现道路建模,车辆检测,机动车、非机动车和行人的目标跟踪,车辆速度,车型等检测功能。
8.要求提供二次开发接口,可供用户进行二次开发。
9.可开展以下实验项目:便携式激光雷达车辆检测技术的工作原理、设备组成和实现功能的学习;激光雷达和视频技术融合实验;便携式激光雷达全息路口感知系统操作实验;与其他智慧交通系统联动实验;提供便携式激光雷达全息路口感知系统二次开发协议,可跟其他智慧交通系统配合使用和集成。








 电话:021-55151269
电话:021-55151269 邮箱:vensn88@163.com
邮箱:vensn88@163.com 在线QQ:
在线QQ: